三自由度圆柱坐标机器人设计
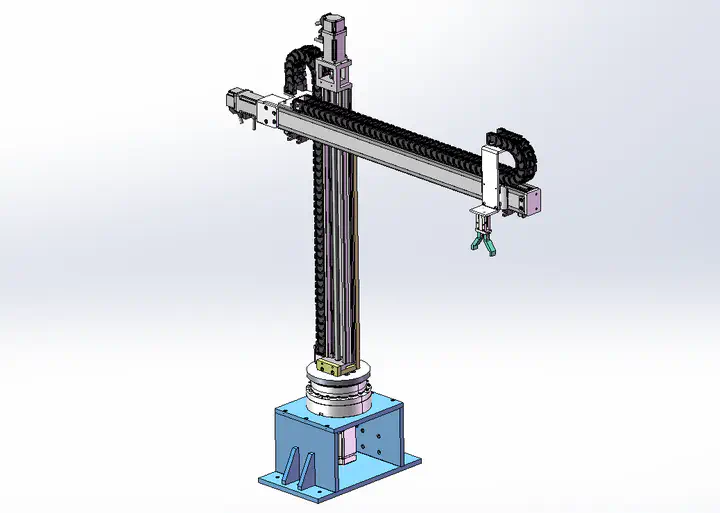 Photo by Zhang Tong on Unsplash
Photo by Zhang Tong on Unsplash总体设计方案
圆柱坐标机器人使用西门子的伺服电机S-1FL6,额度功率0.4kW。Z轴采用了同步带传动,其型号为YTB6,行程为600mm;X轴采用同步带传动,其型号为YTB6,其行程600mm。选择这样的标准驱动器大大的减少了非标件的设计,节省了成本。
采用西门子的PLC进行控制,每个自由度上面都有三个接近传感器,其中两个限位开关一个原点位置开关,每次启动前先进行回原点操作从而找到其定位原点。其六个伺服驱动器通过总线与PLC进行连接,这样就不需外接高速脉冲输出的扩展模块,同时也节省了PLC的输出端口。其PLC也连接一个触摸屏来实现人机交互。当每次设备运行出现错误时期三色塔灯就会进行声光报警。
非标准件的设计与安装
需要先为底部的RV减速器设计连接件。减速器的输出端为直径64mm的内法兰,因此,本连接件的设计主体为与减速器输出端进行配合的外法兰,通过法兰盘中间的短轴与法兰外圈进行定位,通过八个螺钉与减速器进行紧固连接。为不干涉法兰盘上部与z轴的连接,本方案法兰连接螺钉采用沉头布置形式。
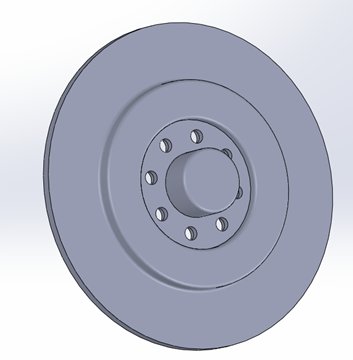
在连接件上部,需要与z轴进行固定连接,考虑到所选z轴结构在底部端面为平面,并无连接所需结构,因此,需设计另与z轴侧面螺纹孔相配合的连接件进行连接。该连接件整体呈L型,底部与上述主体进行螺栓连接,从而将z轴与减速器输出端固联,并起到传递扭矩的作用。

为了更好的保护Z轴机器人,增大它的抗扭能力,在Z轴的机器人侧面加上了两个肋板,这样可以起到支撑和保护的作用。

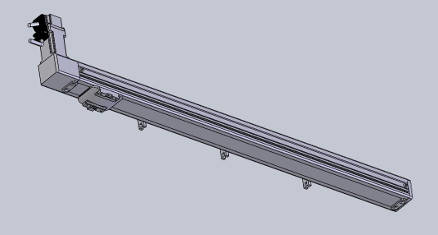
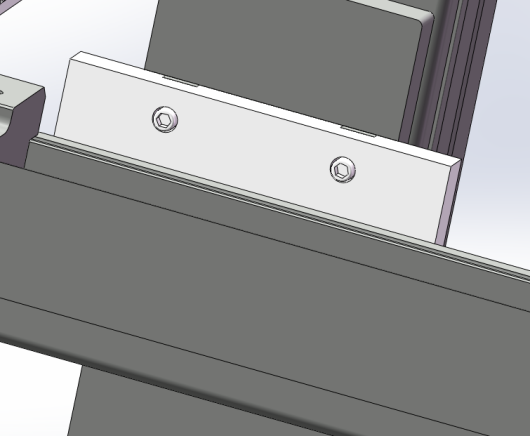
X轴和Z轴机器人以相互垂直的方式连接,为减少连接件的数量并简化连接件的形状,本组采用将两轴的滑块同时固定在同一块连接件上的固定方式,在不影响传动的同时简化了机械结构与末端执行器的运动形式。具体设计形状如下图所示:
为了增加X轴单轴机器人的抗弯能力,特意将与X轴机器人连接的部分加长了一些,与Z轴连接使用的是沉头螺钉,与X轴连接的距离相对较远,不会和Z轴产生干涉,具体装配如图所示:

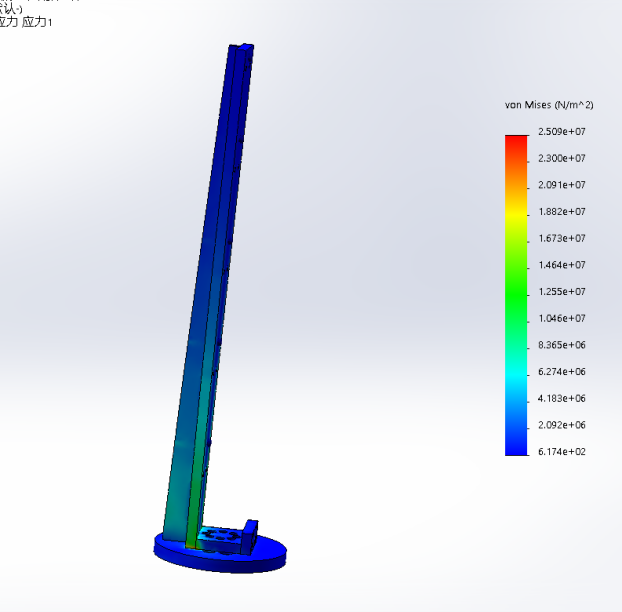
非标准件的强度校核
其主要受力部件为连接Z轴的侧板及肋板,我们对底部连接部分进行整体的静力学仿真,我们得出结果其最大应力为25MPa,对于侧面连接板及肋板我们选用的材料为钢材,其最大屈服强度为235MPa,在安全系数为5的条件下,其满足使用需求
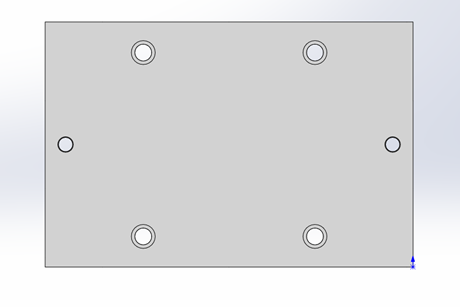
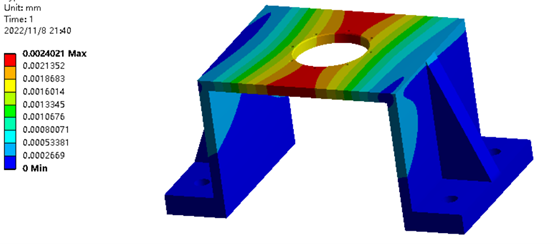
完成底座结构设计后,需要对其进行静力学校核。校核方式同上述连接板的校核。根据上述x轴和z轴的受力分析,可得底座对应的受力情况: 配置相应约束与求解条件,进行求解,结果如下图所示:
控制系统设计
硬件设计
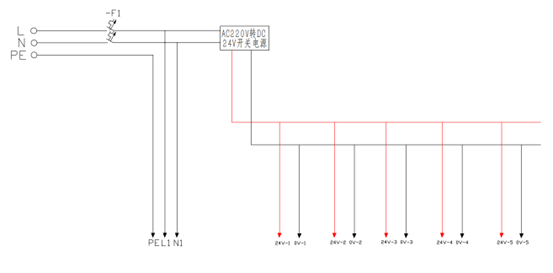
1.主电路与电源供给的设计
输入为220V三相交流电,其中接入断路器、保险丝、接触器KM,热继电器FR;其输出端接三相U、V、W,并接入编码器。
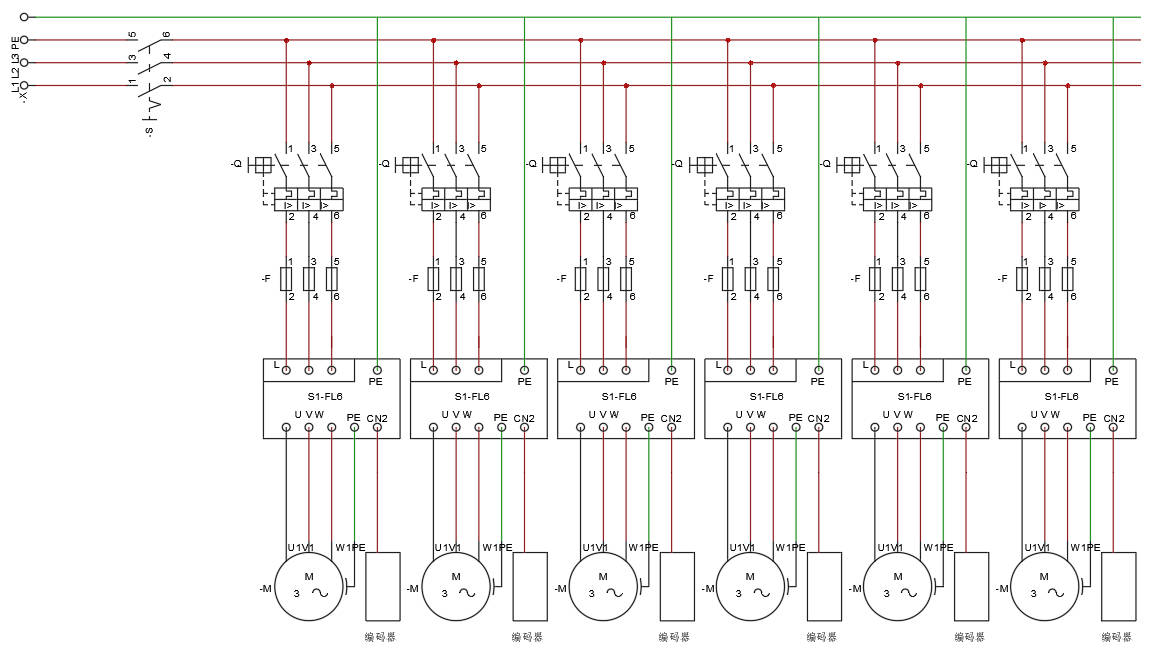
开关电源将220V交流电转换为24V直流电,为PLC与工业触摸屏及三色塔灯进行供电。
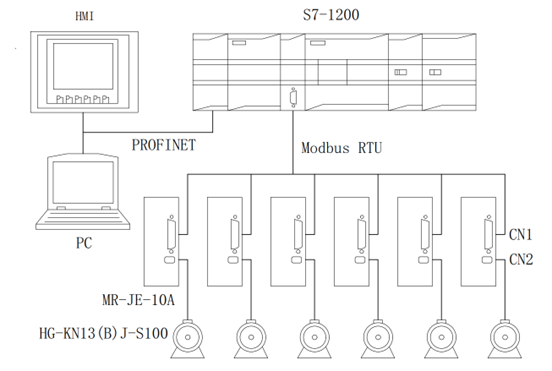
2.PLC接线与通讯设计
完成主电路与开关电源供给图后,是PLC引脚接线与通讯的设计。查阅控制器S7-1200和驱动器MR-JE-10A的产品说明书,使用PROFINET接口连接电脑与HMI触摸屏;MR-JE-10A支持Modbus RTU协议,通过总线使主站PLC与从站驱动器进行通讯。
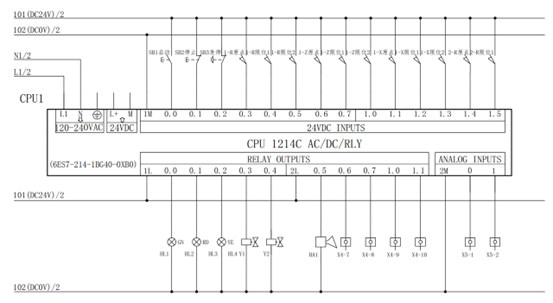
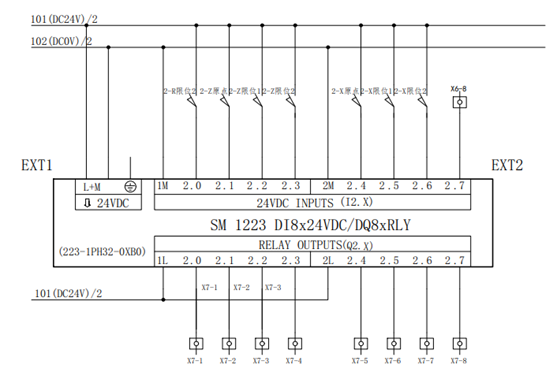
PLC的输入接口需要21个,每个自由度上有两个限位开关和一个原点,以及启动、急停、停止按钮;PLC的输出端口,需要配置两个控制两条机械臂气路中电磁阀的动作。此外,还需要配置颜色分别为红、黄、绿的三个指示灯用作启动报警和启动、停止指示功能。
软件设计
使用博图V16设计梯形图,具体内容如下:
1.驱动器的使用配置。首先我们需要为6个驱动器封装函数块,以便直接输入参数进行操作。封装的函数块中包含6个程序块,其中5个用于电机控制:POEWER、RESET、HOME、MOVE_ABSOLUTE、MOVE_JOG,1个用于输出轴的当前位置。
2.POWER函数。使能,电机启动,通过组态在触摸屏上按下启动按键可以使能。
3.RESET函数。用于当轴运行到限位或者出现故障后的复位。当故障排除后可使能后清楚警报。
4.HOME函数。用于轴的回原点操作。
5.所有轴的运行使用的函数都是MCMove_Absolute,运行到某个轴的移动时,其Execute由会置位1,检测到上升沿后使能该函数,将运行到指定的位置,即赋给其的POSITION;运行到该位置后函数的输出端Done会置位1,从而触发下一个轴运行的FLAG。该标志将刚才已经置位的Execute复位0,同时将下一个轴已复位的Execute置位1,如此进行下去。
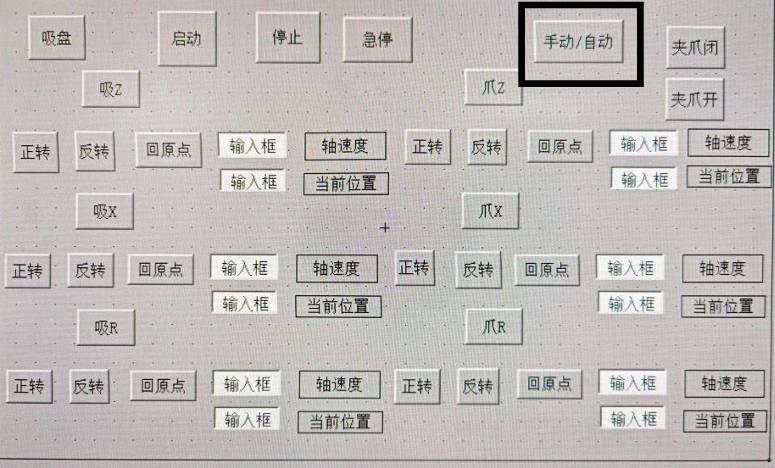
6.MOVE_JOG函数。用于要求的手动操作,点动控制轴的运行,按住保持运行,松开后停止运行。
完整的代码链接:PLC源程序
以下为实验室样机演示图片:

张通
Student of Mechatronic Engineering
My research interests include control system, robotics technology and micromanipulation.